Виды синхронной связи
Прежде чем начать разбираться, что такое и как функционируют сельсины, стоит познакомиться с существующими разновидностями синхронной связи. По данному параметру системы принято делить на системы асинхронного вращения и поворота. Каждая разновидность имеет свои особенности.
Синхронное вращение
В состав входит два одинаковых асинхронных электродвигателя, оснащенных фазными роторами. Обмотки ротора соединяют. Статор подключают к 380 В.

Синхронный поворот
В состав входят сельсины, исполнение которых допускает самосинхронизацию. В зависимости от числа фаз они подразделяются на:
- Трехфазные, чья конструкция полностью соответствует асинхронным двигателям. Область использования таких устройств ограничена из-за наличия разницы между моментами синхронизации при повороте ротора;
- Однофазные, близкие по конструктивному исполнению к машинам синхронного типа с минимальной мощностью. Обмотка возбуждения подобного оборудования работает только при пропускании переменного тока.
Посмотрите видео в конце, чтобы разобраться в особенностях подобной системы.
Принцип действия различных схем
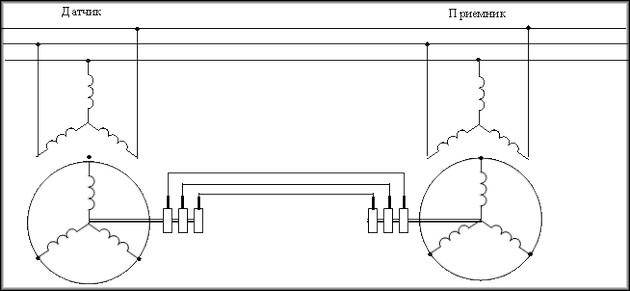
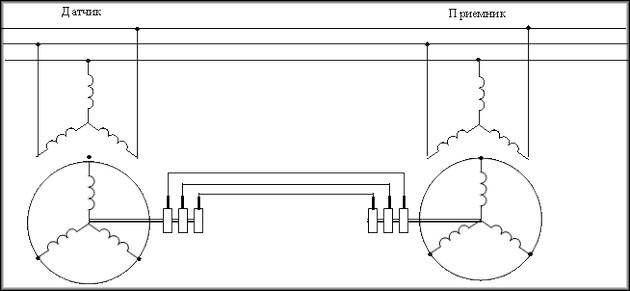
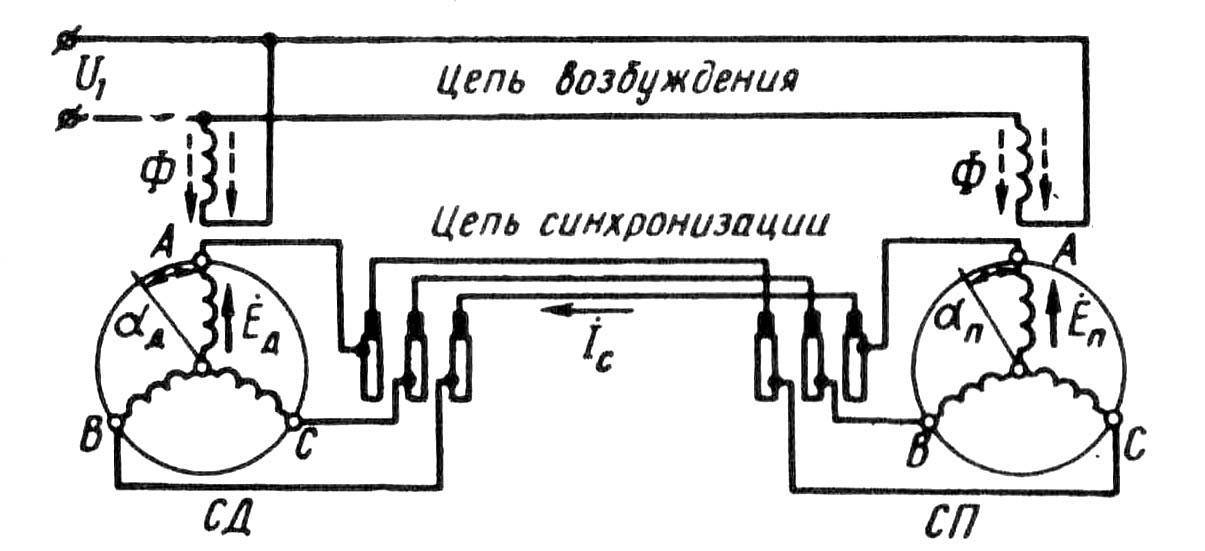
Принцип действия системы наглядно виден на схемах, представленных на рисунке. На схеме «а» датчик и приемник подключены через статорные однокатушечные обмотки к единой сети переменного тока, а обмотки ротора с тремя катушками соединяются друг с другом. Получается система «датчик-приемник». При повороте ротора сельсин-датчика на какую-либо величину угла, ротор приемника повернется на точно такой же угол.
Основой синхронной связи является электромагнитная индукция. Под действием переменного тока обмотки статора, в роторной обмотке индуктируются токи, на величину которых оказывает влияние расположение обмоток статора и ротора относительно друг друга.
Когда роторы в обоих сельсин-устройствах располагаются одинаково относительно статоров, токи в проводах, соединяющий роторы будут при общем равенстве противоположны между собой. Поэтому в каждой катушке ток будет равен нулю. Следовательно валы сельсинов находятся в состоянии покоя и их вращающий момент также равен нулю.
При повороте ротора сельсин-датчика на какой-то угол, данное равновесие токов нарушается и на валу приемника появится вращающий момент. Его ротор будет вращаться до полного исчезновения неравновесия токов. Это неравновесие исчезнет, когда ротор сельсин-приемника примет такое же положение, что и ротор датчика.
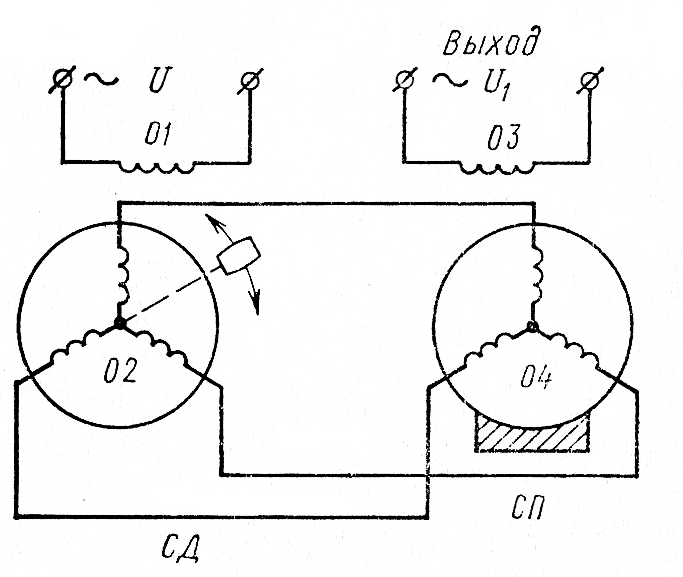
В автоматическом регулировочном режиме довольно часто требуется работа приемника в режиме трансформатора. На схеме «б» видно, что ротор приемника закреплен неподвижно, а обмотка статора отключена от сети. Далее в ней будет индуктироваться ЭДС под влиянием тока, протекающего по обмоткам ротора. Величина этого тока будет зависеть от положения ротора датчика. То есть величина ЭДС ротора приемника будет находиться в пропорции с углом поворота сельсин-датчика. В исходном положении оба ротора смещаются на 90 градусов между собой, поэтому ЭДС на роторе датчика будет равна нулю. Таким образом, поворот ротора датчика вызовет индукцию ЭДС на роторе приемника, пропорциональной углу рассогласования обоих роторов.
Схема «в» отображает работу дифференциального сельсина, который используется для контроля разницы углов поворота сразу двух осей. Два датчика располагаются на двух отдельных валах с одинаковыми скоростями вращения. Третий сельсин-датчик является дифференциальным, а его угол поворота представляет собой разницу между углами поворота датчиков.
Типы сельсиновых датчиков
Любой действующий сельсин включает в свой состав такие обязательные элементы, как статор и ротор, выполненные в виде обмоток с электромагнитной связью. Известны следующие разновидности электротехнических устройств, отличающиеся количеством катушек, расположенных в статоре и роторе. Они могут быть представлены следующими сочетаниями:
- Одна и три.
- Три и одна.
- Три и три.
По своему практическому применению (использованию в электронных схемах авторегулировки) эти приборы делятся на следующие виды:
- устройства-датчики;
- сельсины-приемники;
- приборы дифференциального типа.

Для понимания работы классического сельсинового прибора потребуется рассмотреть его схематическое представление (фото справа).
Классификация по роду тока и принципу действия
Как известно, существует два рода электрического тока – переменный и постоянный.
Исходя из этого, электрические машины также подразделяют по роду тока на два вида – машины электрические переменного тока и машины электрические постоянного тока.
Электрические машины переменного тока
Трансформаторы – наиболее широко применимы в сетях электроснабжения для преобразования напряжений (повышение и понижение). Также довольно широко их применяют в выпрямительных установках для согласования напряжений, в устройствах связи, вычислительной техники и автоматики. Часто применяются и для проведения измерений электрических (измерительные трансформаторы), а также для различных функциональных преобразований (трансформаторы вращающиеся).
Асинхронные электродвигатели – самые распространенные в мире благодаря своей относительной простоте и низкой стоимости. Применяются в промышленных электроустановках (станки, краны, подъемные машины) и в бытовых (компрессора холодильников, вентиляторы, пылесосы). Довольно широкое применение получили однофазные и двухфазные асинхронные управляемые электродвигатели, а также сельсины и тахогенераторы асинхронные.
- Синхронные электродвигатели – наиболее часто применяемы в качестве генераторов электрического тока на электрических станциях. Также применимы в качестве генераторов повышенной частоты в различных источниках питания (например, на кораблях, тепловозах, самолетах). Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ.
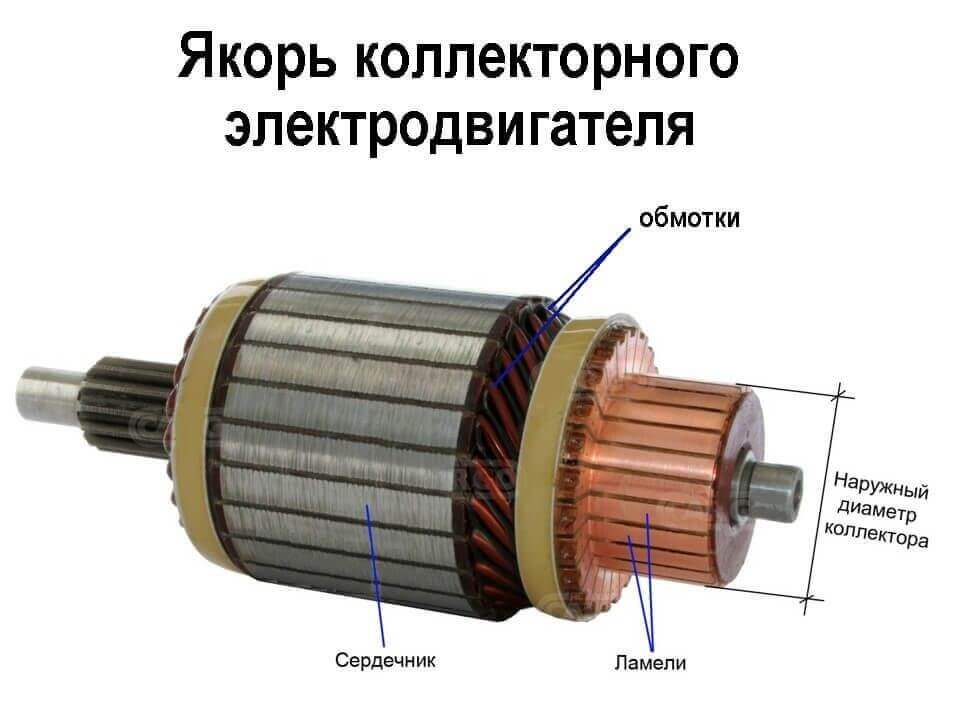
- Коллекторные машины – используют их только в качестве электродвигателей. Это вызвано сложностью их конструкции и необходимостью тщательного ухода. В бытовых электроприборах и устройствах автоматики применяются универсальные коллекторные электродвигатели, способные работать на двух родах тока – постоянном и переменном.
Электрические машины постоянного тока
Они работают практически во всех сферах промышленности и транспорта.
В связи с большим распространением машин постоянного тока также были распространены и генераторы постоянного тока. Они использовались в качестве источников постоянного напряжения для зарядки аккумуляторных батарей, на транспорте (тепловозы, теплоходы и другие), а также в промышленности (система генератор — двигатель). Ввиду развития полупроводниковой техники генераторы постоянного тока постепенно вытесняются из работы и активно заменяются на генераторы переменного тока работающих в паре с полупроводниковым преобразователем.
Также применяются электродвигатели постоянного тока и в системах автоматического управления АСУ в качестве усилителей электромашинных, тахогенераторов и исполнительных электродвигателей.
Электрические микромашины
Микромашины активно применяются в устройствах автоматических.
Их подразделяют на группы:
Силовые микродвигатели – приводят во вращения механизмы различных автоматических устройств. Например, самопишущие устройства и другие.
- Исполнительные (управляемые) микромашины – выполняют преобразование энергии электрической в механическую, то есть ведут обработку определенных команд из вне.
- Тахогенераторы – преобразуют механическую энергию вращения вала в электрический сигнал напряжения, который пропорционален скорости вращения вала.
- Вращающиеся трансформаторы – на выходе этих трансформаторов устанавливается напряжение, пропорциональное функции углу поворота ротора, например синусу или косинусу данного угла или же самому углу.
- Машины синхронной связи – (магнесины или сельсины) осуществляют синфазный и синхронный поворот или же вращения нескольких осей, не имеющих между собой механической связи.
- Микромашины гироскопических приборов – вращают роторы гироскопов с довольно высокой частотой, а также производят коррекцию их положения.
- Электромашинные усилители и преобразователи.
Недостатки, решения
У сельсинов невысокая точность синхронизации, особенно когда на валу сельсина-приёмника присутствует существенная механическая нагрузка.
Для решения этой проблемы сельсинных связей, применяются следящие электромеханические комбинированные связи — приёмный вал вращают вспомогательным электродвигателем, который включается в контур авторегулирования, в этом случае сельсин-приемник выступает в роли датчика угла рассогласования поворотов ведущего и ведомого валов. Т.е. по сути, сельсин в данном случае передаёт только угол поворота, за синхронность вращения валов отвечает авторегулятор, который управляет вспомогательным электродвигателем.









Другой недостаток сельсинов — относительно невысокая точность передачи угла, обусловленная погрешностями изготовления магнитопровода сельсина. Для повышения точности применяют пару сельсинов — «грубый» и «точный» (последний установлен через редуктор и за один оборот основного вала делает несколько оборотов). Если сигнал с грубого сельсина слабее некоторого порога, автоматика передаёт в линию связи сигнал с точного сельсина. Так же, для обеспечения точности, оба сельсина (датчик и приёмник) подключаются через редуктор.
Не имеющий нагрузочного момента ротор сельсина колеблется с частотой питающего переменного тока, поэтому для подавления этих колебаний приходится использовать механические демпферы. Из-за этого, в помещениях, где установлены сельсины, наблюдается постоянный монотонный шум.
В современных устройствах сельсины всё чаще заменяются энкодерами. И только там, где простота, надёжность и ремонтопригодность важнее точности (например, в авиации), сельсины всё ещё находят широкое применение.
Что такое сельсин-датчик и зачем он необходим
Реализация технологического процесса предполагает использование различного оборудования. В некоторых случаях надо добиться синхронного и синфазного вращения осей различных устройств. Иногда по каким-то причинам механическое соединение не представляется возможным. Тогда вместо муфты используют сельсин — специальный датчик, благодаря которому можно добиться требуемой синхронизации. Он нередко входит в состав специальных систем, нуждающихся в повороте на некоторый угол на расстоянии. Сельсин работает в режиме приемника и передающего элемента. Стоит детально разобраться, что это такое, как работает и где может использоваться.

Функция датчика положения
Если взять и каким-либо способом (вручную, например) провернуть ротор одного из приборов на некоторый угол – равновесие токов в его катушке нарушается. Из-за электрической связи в катушках второго устройства наблюдается аналогичное рассогласование баланса токов. Вследствие этого появляется результирующая, отличная от нуля, что приводить к образованию э/м поля и момента индукции (вращающей силы). Под ее воздействием подвижный узел исполнительной части будет проворачиваться до состояния, в котором равновесие токов полностью восстановится. Нетрудно понять, что это состояние будет соответствовать положению другого прибора.
Авторегулирование
При авторегулировании приемник работает в трансформаторном режиме (на схеме – «б»). Его ротор в данной схеме неподвижен, а обмотка статора полностью отключена от сети. В ней наводится ЭДС за счет токов, протекающих в собственной роторной обмотке (их величина задается состоянием первого устройства). Отсюда следует, что величина наводимой в статоре приемника ЭДС полностью зависит от угла поворота подвижной части датчика.
Дополнительная информация: Из-за того, что обмотка статора приемника не подключена к сети – фаза напряжения в нем смещена на 90° относительно статорной катушки датчика.
Это обстоятельство учитываются при вычислении выходной ЭДС (через поправочный коэффициент).
Дифференциальный прибор
Это вариант исполнения применяется в тех случаях, когда возникает потребность в определении разности угловых положений двух электрически связанных приборов (таким образом, выявляется степень их рассогласования). Другими словами размещаемые на различных валах сельсиновые датчики в этом случае сравниваются по скорости перемещения их подвижных узлов, после чего определяется их рассогласование.
В данной схеме три катушки от двух крайних приборов электрически соединены с соответствующими обмотками ротора и статора еще одного (третьего) сельсина, который называется дифференциальным (на схеме – «в»). Угол вращения этого третьего определяется как разность показаний для двух приборов-датчиков.
Источник
Общие сведения, классификация
Машины синхронной связи предназначены для осуществления синхронного или синфазного поворотов двух осей, механически между собой не связанных, или для их вращения. Индукционные системы синхронной связи делятся на трехфазные и однофазные. Трехфазные системы применяются для синхронизации двух валов приводных двигателей, не связанных механически. Обычно это силовые системы относительно большой мощности, носящие название систем электрического вала. Их используют, например, в механизмах разводки мостов, ворот шлюзов, в установках бумажной промышленности и т. д. Однофазные системы применяются в маломощных установках и широко используются в схемах автоматических устройств. Микромашины, применяемые в индукционных системах синхронной связи в качестве датчиков и приемников, получили название сельсинов, подчеркивающее их способность к самосинхронизации (self synchron означает самосинхронизирующийся). В теории синхронной связи автоматических устройств различают два понятия: синхронную индикаторную передачу — индикаторный режим сельсинов и следящий привод — трансформаторный режим сельсинов. В первом случае требуется передать лишь незначительный момент, необходимый, например, для поворота стрелки прибора (индикатора) для указания на расстоянии положения какого-либо регулирующего органа — клапана, задвижки, заслонки, вентиля и т. д. Передача показаний на пульт управления особенно важна в случаях, когда по каким- либо причинам человек не может подойти к регулируемому органу. Схема синхронной индикаторной передачи дана на рисунке 347. Здесь сельсин-датчик Д (заводящее устройство) и сельсин-приемник П (отрабатывающее устройство) при угле заводки а отрабатывают пропорциональный угол са непосредственно, то есть стрелка индикатора находится на оси приемника П. При необходимости передать угол поворота механизму, к валу которого приложен более или менее значительный момент сопротивления, использовать индикаторную схему можно лишь при мощных силовых сельсинах. Мощной должна быть и линия связи. Рациональнее и проще поступить иначе: от датчика к приемнику передать слабый по мощности сигнал, который затем, будучи усилен, воздействует на исполнительный двигатель, связанный с приводным механизмом. В такой системе следящего привода схема связи построена так, чтобы напряжение приемника П (сигнал) было функцией угла поворота ротора датчика Д. Кроме того, между приемником и исполнительным двигателем должна быть обратная связь, приводящая роторы датчика и приемника в согласованное положение (положение нулевого сигнала) по окончании отработки. Схема следящего привода дана на рисунке 348. На заводящем устройстве Д, возбуждаемом напряжением сети, осуществляется механический поворот на угол а (угол заводки). Сигнал, выработанный в отрабатывающем устройстве Я, после предварительного усиления в усилительном устройстве УУ в виде напряжения управления подается на исполнительный двигатель ИД, возбуждаемый напряжением сети. Исполнительный двигатель, будучи соединен механически с валом нагрузки, приводит его во вращение.

Рис. 347. Схема синхронной индикаторной передачи. Рис. 348. Схема следящего привода.
Советуем изучить — Трансформаторы — назначение, принцип действия, виды
Благодаря механической обратной связи исполнительного двигателя с отрабатывающим устройством П будет постепенно уменьшаться напряжение управления, и, когда отрабатывающее устройство П повернется на угол заводки a, Uy станет равным нулю и исполнительный двигатель остановится. В результате произойдет поворот вала нагрузки на угол а или пропорциональный ему са. Индукционным системам синхронной связи присущ ряд положительных свойств: отсутствие искровой коммутации, то есть разрывов цепи питания датчиков при работе системы; высокая точность, обеспечивающая малые углы ошибки между положениями роторов датчика и приемника в согласованном режиме (не выше 2,5° для машин низшего класса); плавность отработки приемником поворота датчика; возможность иметь датчик и приемник бесконтактными; однотипность датчика и приемника.
Виды синхронной связи
Прежде чем начать разбираться, что такое и как функционируют сельсины, стоит познакомиться с существующими разновидностями синхронной связи. По данному параметру системы принято делить на системы асинхронного вращения и поворота. Каждая разновидность имеет свои особенности.
Синхронное вращение
В состав входит два одинаковых асинхронных электродвигателя, оснащенных фазными роторами. Обмотки ротора соединяют. Статор подключают к 380 В.

Синхронный поворот
В состав входят сельсины, исполнение которых допускает самосинхронизацию. В зависимости от числа фаз они подразделяются на:
- Трехфазные, чья конструкция полностью соответствует асинхронным двигателям. Область использования таких устройств ограничена из-за наличия разницы между моментами синхронизации при повороте ротора;
- Однофазные, близкие по конструктивному исполнению к машинам синхронного типа с минимальной мощностью. Обмотка возбуждения подобного оборудования работает только при пропускании переменного тока.

Посмотрите видео в конце, чтобы разобраться в особенностях подобной системы.
Для чего служит сельсин датчик и что это такое
Всем кто хотел бы выяснить, что это такое сельсин датчик, необходимо подробно ознакомиться с его устройством и принципом действия. Для этого, прежде всего, следует понять, что он представляет собой разновидность электрических устройств, работающих только на переменном токе.
Лучший способ понять, что такое сельсин датчик – это разобраться с его назначением. После ознакомления с этим вопросом выясняется, что он позволяет отслеживать поведение подвижных частей двух устройств, удаленных на определенное расстояние. Такая возможность позволяет согласовывать их вращение в отсутствие механической связи (электрическим путем – по проводам). Другими словами, сельсиновые датчики это электрически синхронизированные передающие и приемные устройства.
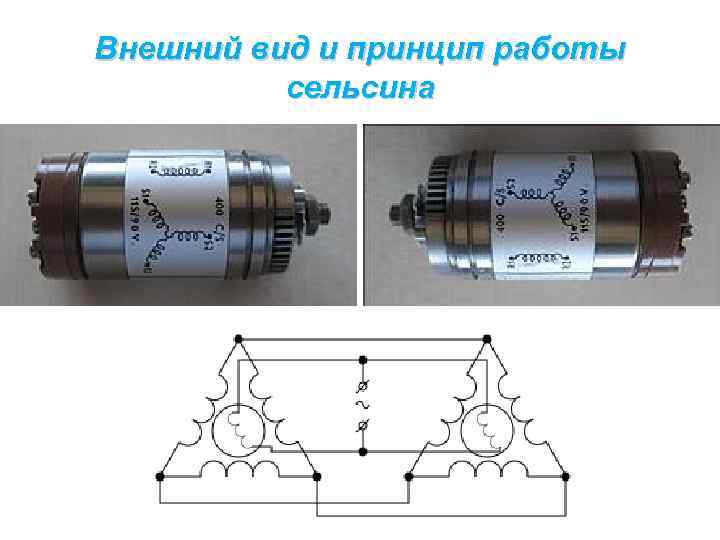
Сельсин
Сельсин — индукционная машина системы индукционной связи. Сельсинами (от англ. self-synchronizing ) называются электрические микромашины переменного тока, обладающие свойством самосинхронизации. Сельсин-передачи работают аналогично обычным механическим передачам, но в них крутящий момент между валами создаётся не при помощи непосредственно контактирующих шестерён, а посредством изменяющегося магнитного потока.








В различных отраслях промышленности, в системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом (например, на РЛС — радиолокационных системах с вращающейся антенной). Такие задачи решаются с помощью систем синхронной связи.
Простейший сельсин состоит из статора с трёхфазной обмоткой (схема включения — треугольник или звезда) и ротора с однофазной обмоткой. Два таких устройства электрически соединяются друг с другом одноимёнными выводами — статор со статором и ротор с ротором. На роторы подаётся одинаковое переменное напряжение. При этом вращение ротора одного сельсина вызывает поворот ротора другого сельсина.
Переменный ток в роторе одного из сельсинов (сельсин-датчика) создаёт в обмотках его статора ЭДС, тем самым вызывая переменный ток через соответствующие обмотки статора второго сельсина (сельсин-приёмника). Переменное магнитное поле, создаваемое этим током, взаимодействует с переменным магнитным полем ротора сельсин-приёмника; возникающий вращательный момент пропорционален разнице между положениями роторов датчика и приёмника, и вызывает поворот последнего до тех пор, пока их положения не станут совпадать.
Типы
Сельсины и системы дистанционной передачи угла поворота подразделяются на две группы: трёхфазные силовые и однофазные.
Трёхфазные сельсины
Трёхфазные сельсины применяются в системах, где требуется обеспечить синфазное и синхронное вращение двух двигателей (валов), находящихся на расстоянии друг от друга.
Однофазные сельсины
Однофазные сельсины могут работать в двух режимах.
- Индикаторный режим. Сельсин-датчик принудительно поворачивается на определённый угол, а сельсин-приёмник устанавливается в соответствующее ему положение.
- Трансформаторный режим. Сельсин-датчик принудительно поворачивается на определённый угол, а на выходе сельсин-приёмника формируется напряжение, являющееся функцией угла рассогласования между ними.
Для обоих режимов существуют схемы включения:
- парная (датчик и приёмник),
- многократная (датчик и несколько приёмников),
- дифференциальная (два датчика и приёмник).
Недостатки, решения
- Невысокая точность синхронизации, когда сельсин находится под нагрузкой. Для этого в передающей цепи применяют пару сельсинов — «грубый» и «точный» (последний установлен через редуктор и за один оборот основного вала делает несколько оборотов). Если сигнал с грубого сельсина слабее некоторого порога, автоматика передаёт в линию сигнал с точного.
- Не нагруженный исполнительными механизмами сельсин колеблется с частотой переменного тока — приходится использовать демпферы.
В современных устройствах сельсины всё чаще заменяются энкодерами. И только там, где простота, надёжность и ремонтопригодность важнее точности (например, в авиации), сельсины всё ещё остаются незаменимыми.
Схема и принцип действия
На предложенных схемах изображены различные варианты включения (как датчика, как приемника и в качестве дифференциального устройства).
После их анализа можно сделать следующие выводы:
- Как датчики, так и приемники своими статорными обмотками напрямую подсоединяются к питающей сети.
- Их 3-х катушечные роторные обмотки объединены линейными электрическими связями.
- За счет такого включения при повороте первичного ротора на заданный угол аналогичный узел приемника повернется на тот же градус.
- Если вращать подвижную часть датчика с фиксированной скоростью – с той же частотой будет крутиться соответствующий узел приемника.

В основу данного эффекта заложен принцип э/м индукции, суть которого состоит в способности обмотки с переменным током наводить поле в близко расположенной катушке (на схеме – вариант «а»).
Важно! Индуцировать стороннее поле способен только меняющийся по величине или фазе (то есть переменный) ток. Величина наводимого в катушке статора ЭДС зависят от ее удаления от роторных обмоток. В случае, когда вращающиеся части двух приборов (приемного и передающего) разнесены от своих статоров на равное расстояние – наблюдается интересный эффект
Он состоит в том, что в этой ситуации токи в роторных контурах равны и противоположны по направлению, что приводит к обнулению их результирующей. Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!
В случае, когда вращающиеся части двух приборов (приемного и передающего) разнесены от своих статоров на равное расстояние – наблюдается интересный эффект. Он состоит в том, что в этой ситуации токи в роторных контурах равны и противоположны по направлению, что приводит к обнулению их результирующей. Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!
Величина наводимого в катушке статора ЭДС зависят от ее удаления от роторных обмоток. В случае, когда вращающиеся части двух приборов (приемного и передающего) разнесены от своих статоров на равное расстояние – наблюдается интересный эффект. Он состоит в том, что в этой ситуации токи в роторных контурах равны и противоположны по направлению, что приводит к обнулению их результирующей. Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!

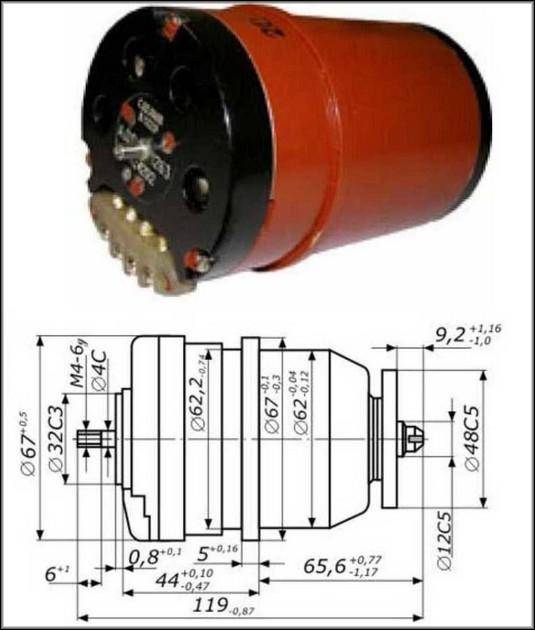
24.2 Устройство сельсинов
Сельсины состоят из статора и ротора. Они имеют одну обмотку возбуждения и три, сдвинутых в пространстве на
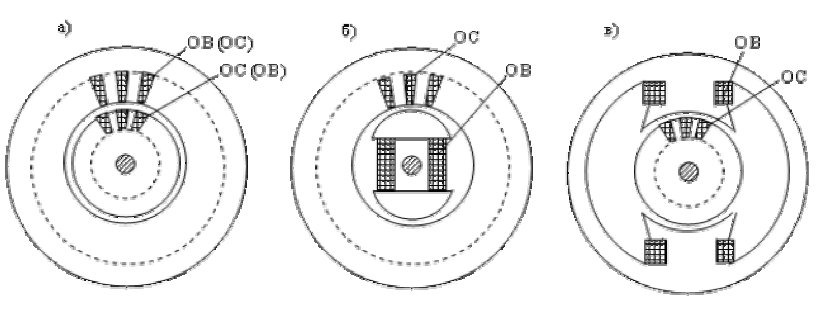
Рис.5.2. Конструктивные схемы контактных сельсинов
Магнитная система контактных сельсинов может быть неявнополюсной (рис.5.2, а,) или явнополюсной (рис.5.2, б, в). Обмотка возбуждения может располагаться как на роторе, так и на статоре. Первая конструкция более предпочтительна, т.к. имеет только два кольца вместо трех.
Большим недостатком контактных сельсинов является наличие скользящего контакта, переходное сопротивление которого может изменяться в довольно широких пределах. Это снижает точность передачи угла и уменьшает надежность работы систем синхронной связи.
Широкое распространение получили бесконтактные сельсины, не имеющие указанного недостатка
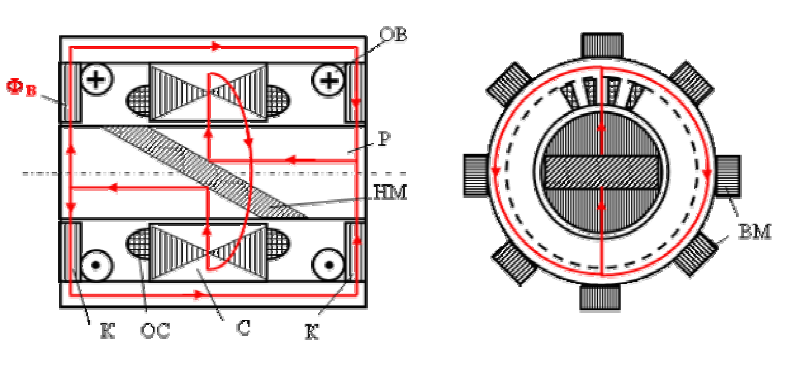
Рис. 5.3. Конструктивная схема и магнитная цепь бесконтактного сельсина
Ротор–Р бесконтактного сельсина (рис.5.3) имеет два стальных пакета, разделенных немагнитным материалом – НМ (обычно сплавом алюминия). Пакеты ротора шихтованы в продольном направлении. Статор состоит из сердечника – С и двух колец – К. В пазах статора уложена обмотка синхронизации – ОС, выполненная по типу трехфазной. К кольцам примыкают пакеты внешнего магнитопровода – ВМ, то же шихтованных в продольном направлении. Обмотка возбуждения – ОВ выполнена в виде двух кольцевых катушек.









Магнитный поток, созданный обмоткой возбуждения, замыкается по пути, показанному на рис.5.3. Из одного пакета ротора он проходит через небольшой воздушный зазор в статор – С. Затем по его спинке проходит половину окружности и выходит в другой пакет ротора. Отражаясь от косого зазора, он по кольцу – К и внешнему магнитопроводу – ВМ снова попадает в первый пакет ротора. При повороте ротора изменяется положение потока возбуждения относительно обмоток синхронизации, поэтому ЭДС, индуцируемые в них, будут зависеть от угла поворота ротора так же, как и в контактном сельсине.
Недостатком бесконтактных сельсинов является худшее использование активных материалов.
Их масса примерно в 1,5 раза больше, чем контактных. Объясняется это большими воздушными зазорами, вследствие чего сельсины имеют значительные потоки рассеяния и большие намагничивающие токи.
голоса
Рейтинг статьи
Общие сведения, классификация
Машины синхронной связи предназначены для осуществления синхронного или синфазного поворотов двух осей, механически между собой не связанных, или для их вращения. Индукционные системы синхронной связи делятся на трехфазные и однофазные. Трехфазные системы применяются для синхронизации двух валов приводных двигателей, не связанных механически. Обычно это силовые системы относительно большой мощности, носящие название систем электрического вала. Их используют, например, в механизмах разводки мостов, ворот шлюзов, в установках бумажной промышленности и т. д. Однофазные системы применяются в маломощных установках и широко используются в схемах автоматических устройств. Микромашины, применяемые в индукционных системах синхронной связи в качестве датчиков и приемников, получили название сельсинов, подчеркивающее их способность к самосинхронизации (self synchron означает самосинхронизирующийся). В теории синхронной связи автоматических устройств различают два понятия: синхронную индикаторную передачу — индикаторный режим сельсинов и следящий привод — трансформаторный режим сельсинов. В первом случае требуется передать лишь незначительный момент, необходимый, например, для поворота стрелки прибора (индикатора) для указания на расстоянии положения какого-либо регулирующего органа — клапана, задвижки, заслонки, вентиля и т. д. Передача показаний на пульт управления особенно важна в случаях, когда по каким- либо причинам человек не может подойти к регулируемому органу. Схема синхронной индикаторной передачи дана на рисунке 347. Здесь сельсин-датчик Д (заводящее устройство) и сельсин-приемник П (отрабатывающее устройство) при угле заводки а отрабатывают пропорциональный угол са непосредственно, то есть стрелка индикатора находится на оси приемника П. При необходимости передать угол поворота механизму, к валу которого приложен более или менее значительный момент сопротивления, использовать индикаторную схему можно лишь при мощных силовых сельсинах. Мощной должна быть и линия связи. Рациональнее и проще поступить иначе: от датчика к приемнику передать слабый по мощности сигнал, который затем, будучи усилен, воздействует на исполнительный двигатель, связанный с приводным механизмом. В такой системе следящего привода схема связи построена так, чтобы напряжение приемника П (сигнал) было функцией угла поворота ротора датчика Д. Кроме того, между приемником и исполнительным двигателем должна быть обратная связь, приводящая роторы датчика и приемника в согласованное положение (положение нулевого сигнала) по окончании отработки. Схема следящего привода дана на рисунке 348. На заводящем устройстве Д, возбуждаемом напряжением сети, осуществляется механический поворот на угол а (угол заводки). Сигнал, выработанный в отрабатывающем устройстве Я, после предварительного усиления в усилительном устройстве УУ в виде напряжения управления подается на исполнительный двигатель ИД, возбуждаемый напряжением сети. Исполнительный двигатель, будучи соединен механически с валом нагрузки, приводит его во вращение.

Рис. 347. Схема синхронной индикаторной передачи. Рис. 348. Схема следящего привода.
Благодаря механической обратной связи исполнительного двигателя с отрабатывающим устройством П будет постепенно уменьшаться напряжение управления, и, когда отрабатывающее устройство П повернется на угол заводки a, Uy станет равным нулю и исполнительный двигатель остановится. В результате произойдет поворот вала нагрузки на угол а или пропорциональный ему са. Индукционным системам синхронной связи присущ ряд положительных свойств: отсутствие искровой коммутации, то есть разрывов цепи питания датчиков при работе системы; высокая точность, обеспечивающая малые углы ошибки между положениями роторов датчика и приемника в согласованном режиме (не выше 2,5° для машин низшего класса); плавность отработки приемником поворота датчика; возможность иметь датчик и приемник бесконтактными; однотипность датчика и приемника.
Типы и режимы работы
Сельсины и системы дистанционной передачи угла поворота подразделяются на две группы: трёхфазные силовые и однофазные.
Трёхфазные сельсины
Трёхфазные сельсины применяются в системах, где требуется обеспечить синфазное и синхронное вращение двух двигателей (валов), находящихся на расстоянии друг от друга.
Однофазные сельсины
Однофазные сельсины могут работать в двух режимах.
- Индикаторный режим. Сельсин-датчик принудительно поворачивается на определённый угол, а сельсин-приёмник устанавливается в соответствующее ему положение.
- Трансформаторный режим. Сельсин-датчик принудительно поворачивается на определённый угол, а на выходе сельсин-приёмника формируется напряжение, являющееся функцией угла рассогласования между ними.

Однофазные индикаторные сельсины электровоза ВЛ80
Для обоих режимов существуют схемы включения:
- парная (датчик и приёмник),
- многократная (датчик и несколько приёмников),
- дифференциальная (два датчика и приёмник).
Рекомендуем:
 регулировка датчика движения для включения света
регулировка датчика движения для включения света
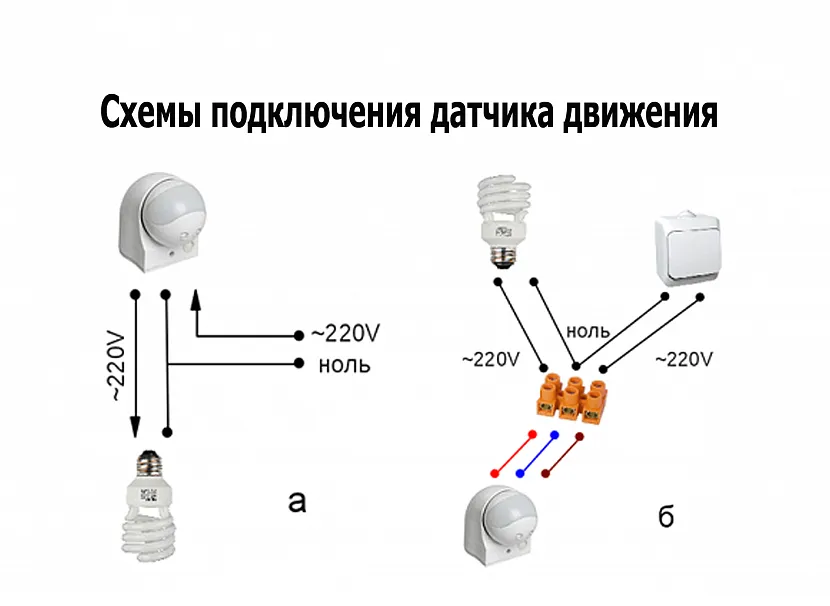
 Как правильно подключить датчик движения для освещения
Как правильно подключить датчик движения для освещения
 как подключить датчик движения
как подключить датчик движения
 схема подключения датчика движения
схема подключения датчика движения
 Бесколлекторный двигатель
Бесколлекторный двигатель
 как подключить датчик движения к прожектору
как подключить датчик движения к прожектору
 электродвигатель из автомобильного генератора своими руками
электродвигатель из автомобильного генератора своими руками
 фотореле для уличного освещения
фотореле для уличного освещения
 как подключить фотореле
как подключить фотореле
 как перемотать электродвигатель в домашних условиях
как перемотать электродвигатель в домашних условиях
